
Landbouwrobot zal mechanische onkruidbestrijding ondersteunen in biologische beddenteelt
Tegen 2050 voorspelt de VN dat de wereldwijde voedselproductie met meer dan 70% moet toenemen om een grotere wereldbevolking, geschat op 9,1 miljard mensen, te blijven ondersteunen. Naarmate de bevolking en de koopkracht van de mensen toeneemt, zal de vraag naar meer gevarieerde en gezonde voeding stijgen. De landbouw, zeker de kleinschalige biolandbouw, staat in zo’n toekomst voor heel wat uitdagingen zoals milieu-impact en financiële rentabiliteit. Duurzaam gebruikmaken van het beschikbare land, maar ook van technologische innovaties zoals landbouwrobots, kan deels een oplossing bieden.

De introductie van robotica in de traditionele landbouw kan radicale veranderingen in de sector teweegbrengen. Momenteel kiezen veel landbouwers nog steeds voor grotere en zwaardere machines om zo de performantie en arbeidsefficiëntie te verhogen. Zware machines hebben een hoge kostprijs, ze zijn complexer en veroorzaken ernstige problemen met betrekking tot de verdichting van de bodem. In tegenstelling tot de grote, industriële landbouwondernemingen, hebben kleinere biotelers, met name Community Supported Agriculture (CSA) bedrijven, vaak minder financiële mogelijkheden om grote investeringen te doen en bijhorende risico’s te dragen. Bovendien worden in dergelijke teelten veel verschillende gewassen verbouwd waardoor de vraag naar handarbeid groot is. Hier kunnen robots een ondersteunende rol spelen in het uitvoeren van arbeidsintensieve taken.
Voor en door de boer
Uit gesprekken en observaties bij zes Community Supported Agriculture (CSA) bedrijven in België en Nederland blijkt dat vooral de arbeidsintensiteit bij onkruidbestrijding het grootst is. Dit komt omdat er nog veel manuele interventies noodzakelijk zijn, zoals het wieden tussen de gewassen in de rijen en het feit dat in dergelijke landbouwondernemingen geen bestrijdingsmiddelen gebruikt worden. Deze arbeidsintensieve, repetitieve taak kan geautomatiseerd worden door inzet van semiautonome robotsystemen. Vandaag bestaan er al robots op de markt die specifiek ontwikkeld werden om onkruid mechanisch te bestrijden. Maar voor kleine bedrijven vormen de hoge kostprijs en beperkte flexibiliteit van deze platformen echter nog steeds een drempel. Een betaalbare, multi-inzetbare robot, die naast wieden ook gebruikt kan worden om te zaaien of te oogsten én waarbij de boer zelf de handen uit de mouwen kan steken om het systeem aan te passen aan de noden van zijn bedrijf zou hierin een sterke stap vooruit kunnen betekenen. De ontwikkeling van zo’n semiautonome robot vergt echter vaak een multidisciplinaire aanpak. Daarom sloegen we samen met ILVO, AIRO-lab (UGent) en de CSA-bedrijven de handen in elkaar om een prototype te ontwikkelen die een aanzet moet geven tot een duurzamere en efficiëntere toekomst voor de sector.
Hoe wordt zo’n robot nu ontworpen?
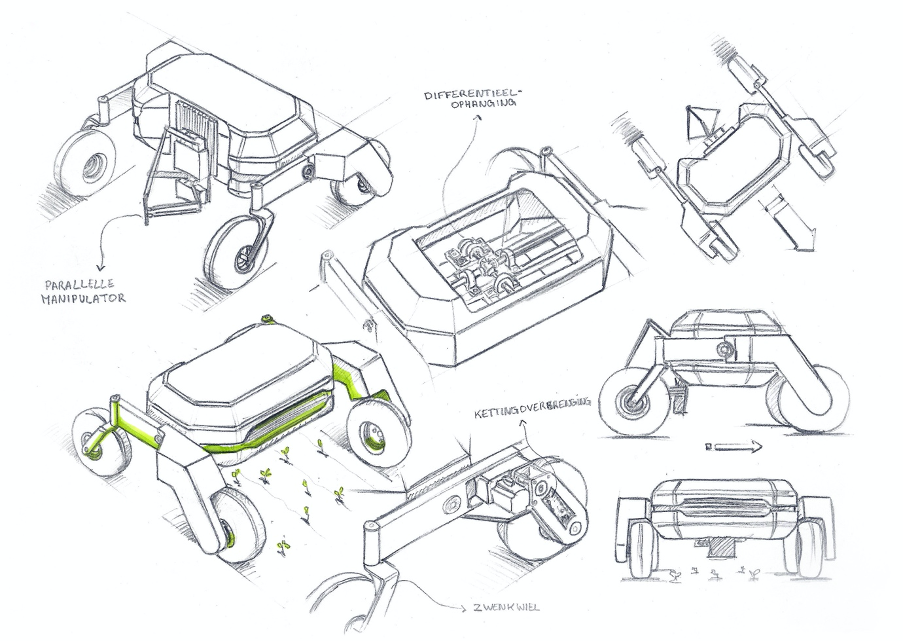
De grootte van de robot is afgesteld op de biologische beddenteelt, die door CSA-bedrijven veel toegepast wordt. Naast de breedte van de bedden moest ook rekening gehouden worden met de hoogte van de gewassen, het oneffen terrein, transport van de robot en heel wat andere vereisten van de telers. Om bodemverdichting zo veel mogelijk te vermijden was het nodig om de robot zo licht mogelijk te ontwerpen. Belangrijk is ook dat het platform stabiel over oneffen terrein kan rijden. Hiervoor werd een ophanging ontwikkeld gebaseerd op het ontwerp van de NASA Marsrover. Door middel van twee betaalbare GPS-antennes kunnen de positie en oriëntatie van de robot nauwkeurig bepaald worden. Op deze manier kan de robot op semiautonome wijze over de bedden navigeren. Verder werd de kost van het platform zo laag mogelijk gehouden door alleen twee motoren te gebruiken voor zowel de aandrijving als het sturen.
Het ontwerp startte vanuit gesprekken en observaties bij de boeren en het betrekken van experts. Vervolgens kreeg het vorm door eenvoudige schetsen en visualisaties. Zo is het uitgegroeid tot een werkend prototype, voorzien van de nodige componenten om verschillende landbouwtaken uit te voeren zoals mechanische onkruidbestrijding.
Toekomst
In een volgende fase wordt gefocust op de sturing en autonome navigatie. Op deze manier zal de robot volledig zelfstandig over het veld kunnen rijden. Hij wordt dan ook voorzien van sensoren om obstakels te detecteren. Hierdoor kan de robot op een veilige manier in zijn omgeving werken.
Daarnaast wordt ook gewerkt aan taak specifieke gereedschappen of werktuigen die aan deze multi-inzetbare robot kunnen worden gekoppeld. In de eerste fase van dit project werd, samen met het platform, een robotarm ontwikkeld. Deze brengt een geschikt gereedschap naar de onkruidplantjes nadat een camera ze heeft herkend als onkruid. Het gereedschap heeft als doel het ongewenste plantje mechanisch te verwijderen. Een eerste prototype gereedschap is reeds in de maak; een stempel die ontkiemend onkruid terug in de grond drukt.
Uiteindelijk is het de bedoeling om zo veel mogelijk gereedschappen aan de robot te kunnen koppelen. Hierbij kunnen de werktuigen evenwel door de boer zelf ontwikkeld worden.

De robot zal naast het gebruik voor een fysieke interactie met de groeibedden ook ingezet worden om data te verzamelen op het veld. Het verzamelen van specifieke data kan de boer helpen om ziekten, plagen of uitdroging te voorkomen, maar ook om de groei van het gewas op te volgen.
Op basis van de kennis die opgedaan werd in dit project, is het de bedoeling een ecosysteem te creëren. Hierbij kunnen zowel boeren als constructeurs samen werken om robots en gereedschappen te ontwikkelen. Dit gebeurt op een open en flexibele wijze, steeds op maat voor kleinschalige bioteelt ondernemingen.
Dankzij technologische innovatie, gekoppeld aan de kennis van boeren, biedt dit project een antwoord op enkele uitdagingen binnen de bioteelt. Zodoende wordt er gestreefd naar een meer duurzame toekomst binnen de sector.
Bibliografie
J. Gulliksen, B. Göransson, I. Boivie, S. Blomkvist, J. Persson, and Å. Cajander, “Key principles for user-centred systems design,” in Behaviour and Information Technology, 2003.
FAO, “How to Feed the World in 2050,” Insights from an Expert Meet. FAO, no. 1, pp. 1–35, 2009.
J. Platteau, L. Guy, R. Kris, and T. Van Bogaert, “Uitdagingen voor de vlaamse land- en tuinbouw,” Agric. Rep. 2018, p. 472, 2018.
E. Lmn-bedrijven, “Focus Precisielandbouwtechnieken,” pp. 1–11, 2018.
J.-M. Fortier, The market gardener: A successful grower’s handbook for small-scale organic farming. New Society Publishers, 2014.
CSA-netwerk VZW, “Als consument en boer samen verantwoordelijkheid opnemen,” 2020. [Online]. Available: www.csa-netwerk.be.
J. Paull, “Biodynamic Agriculture: The Journey From Koberwitz To The World, 1924-1938,” J. Org. Syst., 2011.
S. Witt, “Group Effort Saves Natio ’S First Csa Farm,” in Business-Emmaus Pennsylvania-, vol. 22, no. 2, pp. 28–30, 2000.
E. Tegtmeier and M. Duffy, “Community supported agriculture (CSA) in the Midwest United States: A regional characterization,” Staff Gen. Res. Pap., 2005.
T. Lang, “Crisis? What crisis? The normality of the current food crisis,” J. Agrar. Chang., 2010.
C. A. Cone and A. Myhre, “Community-supported agriculture: A sustainable alternative to industrial agriculture?,”Hum. Organ., 2000.
L. Oberholtzer, “Community supported agriculture in the Mid-Atlantic Region. Results of a Shareholder Survey and Farmer Interviews.,” Small Farm Success Proj., 2004.
S. U. O’Hara and S. Stagl, “Global Food Markets and Their Local Alternatives: A Socio-Ecological Economic Perspective,” Popul. Environ., 2001.
J. P. Cooley and D. A. Lass, “Consumer Benefits from Community Supported Agriculture Membership,” Rev. Agric. Econ., 1998.
S. M. Schnell, “Food miles, local eating, and community supported agriculture: Putting local food in its place,” Agric. Human Values, 2013.
CSA-netwerk VZW, “Als consument en boer samen verantwoordelijkheid opnemen,” 2020.
G. Davies, B. Turner, and B. Bond, Weed Management for Organic Farmers, Growers and Smallholders. Crowood Press, 2008.
P. E. Hatcher and B. Melander, “Combining physical, cultural and biological methods: Prospects for integrated non-chemical weed management strategies,” Weed Research. 2003.
M. Liebman and A. S. Davis, “Managing Weeds in Organic Farming Systems: An Ecological Approach The Weed Management Tool Kit for Organic Farming,” in Organic Farming: The Ecological System, 2009.
M. Liebman and A. S. Davis, “Integration of soil, crop and weed management in low-external-input farming systems,” Weed Res., 2000.
R. G. Hartzler and D. D. Buhler, “Ecological management of agricultural weeds,” in Ecologically-Based Integrated Pest Management, 2007.
B. Melander, K. Rasmussen, I. A. Rasmussen, and M. H. Jorgensen, “Row hoeing followed by weed harrowing in winter cereals in spring under the influence of different cropping factors.,” in DJF Rapport, Markbrug; 18th Danish Plant Protection Conference 1., 2001.
M. A. Busari, S. S. Kukal, A. Kaur, R. Bhatt, and A. A. Dulazi, “Conservation tillage impacts on soil, crop and the environment,” International Soil and Water Conservation Research. 2015.
W. C. Johnson and B. G. Mullinix, “Stale seedbed weed control in cucumber,” Weed Sci., 1998.
K. M. Hartmann and W. Nezadal, “Photocontrol of Weeds Without Herbicides,” Naturwissenschaften, 1990.
P. J. W. Lutman et al., “Persistence of seeds from crops of conventional and herbicide tolerant oilseed rape (Brassica napus),” Proc. R. Soc. B Biol. Sci., 2005.
D. L. Karlen, G. E. Varvel, D. G. Bullock, and R. M. Cruse, “Crop rotations for the 21st century,” Adv. Agron., 1994.
W. Bond, S. Burston, J. R. Bevan, and M. E. K. Lennartsson, “Optimum Weed Removal Timing in Drilled Salad Onions and Transplanted Bulb Onions Grown in Organic and Conventional Systems,” Biol. Agric. Hortic., 1998.
W. Bond, R. . J. Turner, and A. C. Grundy, “A review of non-chemical weed management,” 2003.
R. J. Turner, M. E. K. Lennartsson, W. Bond, A. C. Grundy, and D. Whitehouse, “Organic weed control -getting it right in time,” in Proceedings of the 1999 Brighton Conference - Weeds. 15-18 November 1999. Hilton Brighton Metropole Hotel, UK, 1999.
D. W. M. Pullen and P. A. Cowell, “An evaluation of the performance of mechanical weeding mechanisms for use in high speed inter-row weeding of arable crops,” J. Agric. Eng. Res., 1997.
R. Holmøy and J. Netland, “BAND SPRAYING, SELECTIVE FLAME WEEDING AND HOEING IN LATE WHITE CABBAGE - PART I,” Acta Hortic., 1994.
J. ASCARD, “Effects of flame weeding on weed species at different developmental stages,” Weed Res., 1995.
J. Andersen, “Experimental Trials and Modelling of Hydrogen and Propane Burners for Use in Selective Flaming,” Biol. Agric. Hortic., 1997.
J. Ascard and B. Mattsson, “Inter-row cultivation in weed-free carrots: The effect on yield of hoeing and brush weeding,” Biol. Agric. Hortic., 1994.
M. E. K. Lennartsson, “The use of surface mulches to clear grass pasture and control weeds in organic horticultural systems,” BCPC Monogr. no. 45 Crop Prot. Org. Low Input Agric., 1990.
V. Bloch, A. Degani, and A. Bechar, “A methodology of orchard architecture design for an optimal harvesting robot,” Biosyst. Eng., 2018.
T. Bakker, K. Asselt, J. Bontsema, J. Müller, and G. Straten, “Systematic design of an autonomous platform for robotic weeding,” J. Terramechanics, 2010.
K. Jensen et al., “A Low Cost, Modular Robotics Tool Carrier For Precision Agriculture Research,” in Proceeding of the International Confeence on Precision Agriculture, 2012.
W. Day, “Engineering advances for input reduction and systems management to meet the challenges of global food and farming futures,” J. Agric. Sci., 2011.
“ecoRobotix,” 2020. [Online]. Available: www.ecorobotix.com.
A. Ruckelshausen et al., “BoniRob: An autonomous field robot platform for individual plant phenotyping,”in Precision Agriculture 2009 - Papers Presented at the 7th European Conference on Precision Agriculture, ECPA 2009, 2009.
O. J. Bawden, D. Ball, T. Perez, and P. Corke, “DESIGN OF A LIGHTWEIGHT, MODULAR ROBOTIC VEHICLE FOR THE SUSTAINABLE INTENSIFICATION OF BROADACRE AGRICULTURE,” 2015.
A. Ruckelshausen, R. Klose, A. Linz, J. Marquering, M. Thiel, and S. Tölke, “Autonome roboter zur unkrautbekämpfung,”in Journal of Plant Diseases and Proctectio, Supplement, 2006.
R. Bogue, “Domestic robots: Has their time finally come?,” Ind. Rob., 2017.
R. N. Jørgensen et al., “Hortibot: A system design of a robotic tool carrier for high-tech plant nursing,” CIGR Ejournal, 2007.
R. Bogue, “Robots poised to revolutionise agriculture,” Ind. Rob., 2016.
C. Jeffrey, “‘Ladybird’ autonomous robot to help out down on the farm,” 2014. [Online]. Available: https://newatlas.com/.
“Farm business management: Machinery investment and costs,” 2014. .
M. Demmel, R. Brandhuber, H. Kirchmeier, M. Müller, and M. Marx, “Controlled traffic farming-technical and organizational realization,” Landtechnik, 2012.
“1 DECEMBER 1975. - Koninklijk besluit houdende algemeen reglement op de politie van het wegverkeer en van het gebruik van de openbare weg.,” Artikel 46. Lading van de voertuigen : afmetingen. [Online]. Available: https://wegcode.be/wetteksten/secties/kb/wegcode/222-art46.
M. Vasic and A. Billard, “Safety issues in human-robot interactions,” in Proceedings - IEEE International Conference on Robotics and Automation, 2013.
S. Adarsh, S. M. Kaleemuddin, D. Bose, and K. I. Ramachandran, “Performance comparison of Infrared and Ultrasonic sensors for obstacles of different materials in vehicle/ robot navigation applications,” in IOP Conference Series: Materials Science and Engineering, 2016.
K. H. Hunt, “Structural kinematics of in‐parallel‐actuated robot‐arms,” J. Mech. Des. Trans. ASME, 1983.
J. P. Merlet, “Determination of the orientation workspace of parallel manipulators,” J. Intell. Robot. Syst., 1995.
C. Gosselin and J. Angeles, “Singularity Analysis of Closed-Loop Kinematic Chains,” IEEE Trans. Robot. Autom., 1990.
C. J. Harris, “Autonomous robot vehicles,” Eng. Appl. Artif. Intell., 1991.
G. Antonelli and S. Chiaverini, “Linear estimation of the physical odometric parameters for differential-drive mobile robots,” Auton. Robots, 2007.
Y. Li, S. Ge, H. Zhu, H. Fang, and J. Gao, “Mobile platform of rocker-type coal mine rescue robot,” Min. Sci. Technol., 2010.
H. Makino, “KINEMATICAL CLASSIFICATION OF ROBOT MANIPULATORS.”
M. Carricato, “Fully isotropic four-degrees-of-freedom parallel mechanisms for schoenflies motion,” Int. J. Rob. Res., 2005.
T. Huang, S. Liu, J. Mei, and D. G. Chetwynd, “Optimal design of a 2-DOF pick-and-place parallel robot using dynamic performance indices and angular constraints,” Mech. Mach. Theory, 2013.
G. Wu, “Kinematic Analysis and Optimal Design of a Wall-mounted Four-limb Parallel Schönflies-motion Robot for Pick-and-place Operations,” J. Intell. Robot. Syst. Theory Appl., 2017.
J. Angeles, S. Caro, W. Khan, and A. Morozov, “Kinetostatic design of an innovative Schönflies-motion generator,” Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci., 2006.
G. Gogu, “Singularity-free fully-isotropic parallel manipulators with Schönflies motions,” in 2005 International Conference on Advanced Robotics, ICAR ’05, Proceedings, 2005.
L. T. Schreiber and C. Gosselin, “Schönflies Motion PARAllel Robot (SPARA): A Kinematically Redundant Parallel Robot with Unlimited Rotation Capabilities,” IEEE/ASME Trans. Mechatronics, 2019.
S. Chauhan, “Motor Torque Calculations For Electric Vehicle,” Int. J. Sci. Technol. Res., vol. 4, no. 8, pp. 126–127, 2015.
L. Karafiath, “Rolling Resistance of Off-Road Vehicles,” 1998.
J. Carvill, Mechanical engineer’s data handbook. 1994.






