
Landbouwrobot zal mechanische onkruidbestrijding ondersteunen in biologische beddenteelt
Tegen 2050 voorspelt de VN dat de wereldwijde voedselproductie met meer dan 70% moet toenemen om een grotere wereldbevolking, geschat op 9,1 miljard mensen, te blijven ondersteunen. Naarmate de bevolking en de koopkracht van de mensen toeneemt, zal de vraag naar meer gevarieerde en gezonde voeding stijgen. De landbouw, zeker de kleinschalige biolandbouw, staat in zo’n toekomst voor heel wat uitdagingen zoals milieu-impact en financiële rentabiliteit. Duurzaam gebruikmaken van het beschikbare land, maar ook van technologische innovaties zoals landbouwrobots, kan deels een oplossing bieden.

De introductie van robotica in de traditionele landbouw kan radicale veranderingen in de sector teweegbrengen. Momenteel kiezen veel landbouwers nog steeds voor grotere en zwaardere machines om zo de performantie en arbeidsefficiëntie te verhogen. Zware machines hebben een hoge kostprijs, ze zijn complexer en veroorzaken ernstige problemen met betrekking tot de verdichting van de bodem. In tegenstelling tot de grote, industriële landbouwondernemingen, hebben kleinere biotelers, met name Community Supported Agriculture (CSA) bedrijven, vaak minder financiële mogelijkheden om grote investeringen te doen en bijhorende risico’s te dragen. Bovendien worden in dergelijke teelten veel verschillende gewassen verbouwd waardoor de vraag naar handarbeid groot is. Hier kunnen robots een ondersteunende rol spelen in het uitvoeren van arbeidsintensieve taken.
Voor en door de boer
Uit gesprekken en observaties bij zes Community Supported Agriculture (CSA) bedrijven in België en Nederland blijkt dat vooral de arbeidsintensiteit bij onkruidbestrijding het grootst is. Dit komt omdat er nog veel manuele interventies noodzakelijk zijn, zoals het wieden tussen de gewassen in de rijen en het feit dat in dergelijke landbouwondernemingen geen bestrijdingsmiddelen gebruikt worden. Deze arbeidsintensieve, repetitieve taak kan geautomatiseerd worden door inzet van semiautonome robotsystemen. Vandaag bestaan er al robots op de markt die specifiek ontwikkeld werden om onkruid mechanisch te bestrijden. Maar voor kleine bedrijven vormen de hoge kostprijs en beperkte flexibiliteit van deze platformen echter nog steeds een drempel. Een betaalbare, multi-inzetbare robot, die naast wieden ook gebruikt kan worden om te zaaien of te oogsten én waarbij de boer zelf de handen uit de mouwen kan steken om het systeem aan te passen aan de noden van zijn bedrijf zou hierin een sterke stap vooruit kunnen betekenen. De ontwikkeling van zo’n semiautonome robot vergt echter vaak een multidisciplinaire aanpak. Daarom sloegen we samen met ILVO, AIRO-lab (UGent) en de CSA-bedrijven de handen in elkaar om een prototype te ontwikkelen die een aanzet moet geven tot een duurzamere en efficiëntere toekomst voor de sector.
Hoe wordt zo’n robot nu ontworpen?
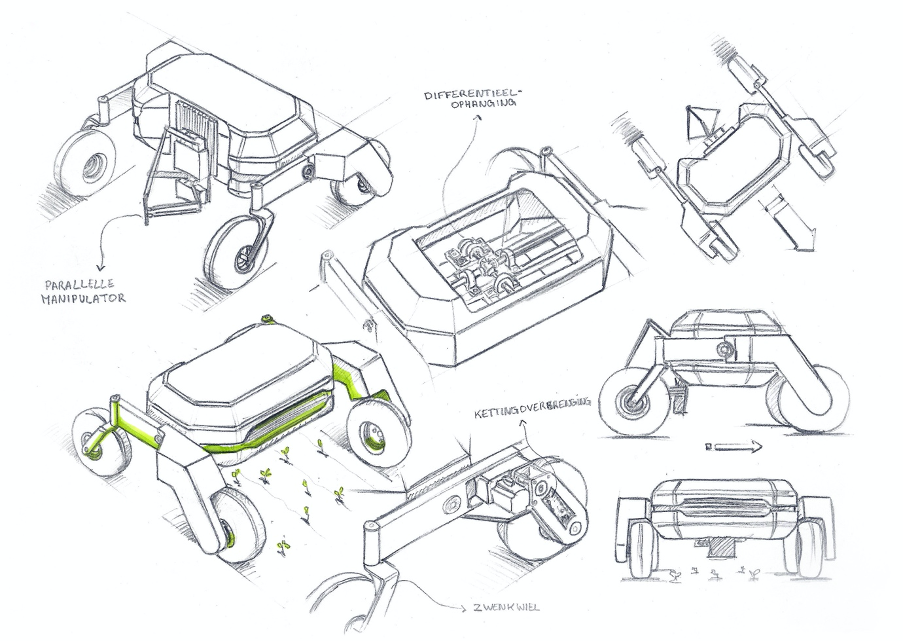
De grootte van de robot is afgesteld op de biologische beddenteelt, die door CSA-bedrijven veel toegepast wordt. Naast de breedte van de bedden moest ook rekening gehouden worden met de hoogte van de gewassen, het oneffen terrein, transport van de robot en heel wat andere vereisten van de telers. Om bodemverdichting zo veel mogelijk te vermijden was het nodig om de robot zo licht mogelijk te ontwerpen. Belangrijk is ook dat het platform stabiel over oneffen terrein kan rijden. Hiervoor werd een ophanging ontwikkeld gebaseerd op het ontwerp van de NASA Marsrover. Door middel van twee betaalbare GPS-antennes kunnen de positie en oriëntatie van de robot nauwkeurig bepaald worden. Op deze manier kan de robot op semiautonome wijze over de bedden navigeren. Verder werd de kost van het platform zo laag mogelijk gehouden door alleen twee motoren te gebruiken voor zowel de aandrijving als het sturen.
Het ontwerp startte vanuit gesprekken en observaties bij de boeren en het betrekken van experts. Vervolgens kreeg het vorm door eenvoudige schetsen en visualisaties. Zo is het uitgegroeid tot een werkend prototype, voorzien van de nodige componenten om verschillende landbouwtaken uit te voeren zoals mechanische onkruidbestrijding.
Toekomst
In een volgende fase wordt gefocust op de sturing en autonome navigatie. Op deze manier zal de robot volledig zelfstandig over het veld kunnen rijden. Hij wordt dan ook voorzien van sensoren om obstakels te detecteren. Hierdoor kan de robot op een veilige manier in zijn omgeving werken.
Daarnaast wordt ook gewerkt aan taak specifieke gereedschappen of werktuigen die aan deze multi-inzetbare robot kunnen worden gekoppeld. In de eerste fase van dit project werd, samen met het platform, een robotarm ontwikkeld. Deze brengt een geschikt gereedschap naar de onkruidplantjes nadat een camera ze heeft herkend als onkruid. Het gereedschap heeft als doel het ongewenste plantje mechanisch te verwijderen. Een eerste prototype gereedschap is reeds in de maak; een stempel die ontkiemend onkruid terug in de grond drukt.
Uiteindelijk is het de bedoeling om zo veel mogelijk gereedschappen aan de robot te kunnen koppelen. Hierbij kunnen de werktuigen evenwel door de boer zelf ontwikkeld worden.

De robot zal naast het gebruik voor een fysieke interactie met de groeibedden ook ingezet worden om data te verzamelen op het veld. Het verzamelen van specifieke data kan de boer helpen om ziekten, plagen of uitdroging te voorkomen, maar ook om de groei van het gewas op te volgen.
Op basis van de kennis die opgedaan werd in dit project, is het de bedoeling een ecosysteem te creëren. Hierbij kunnen zowel boeren als constructeurs samen werken om robots en gereedschappen te ontwikkelen. Dit gebeurt op een open en flexibele wijze, steeds op maat voor kleinschalige bioteelt ondernemingen.
Dankzij technologische innovatie, gekoppeld aan de kennis van boeren, biedt dit project een antwoord op enkele uitdagingen binnen de bioteelt. Zodoende wordt er gestreefd naar een meer duurzame toekomst binnen de sector.







